Humanoid Robot Hand Design
The rational behind a Synthetic AI Hand Project is easy. The entire human race civilization is built by a pair of hands duplicated over and over again doing the little things that collectively becomes civilization. So if we could make a pair of really good AI infused synthetic hands, only one pair of hands would ever get built, and the rest are all just duplicates that can do most things humans can do.
Infrastructure
- Infrastructure for Synthetic AI Hand Project needed. We use Hypercube PCBs that make all the relevant peripherals connected to the CPUs that drive the actuators. Several of the boards needed for the actuators has been prototyped ( Open Boards ).
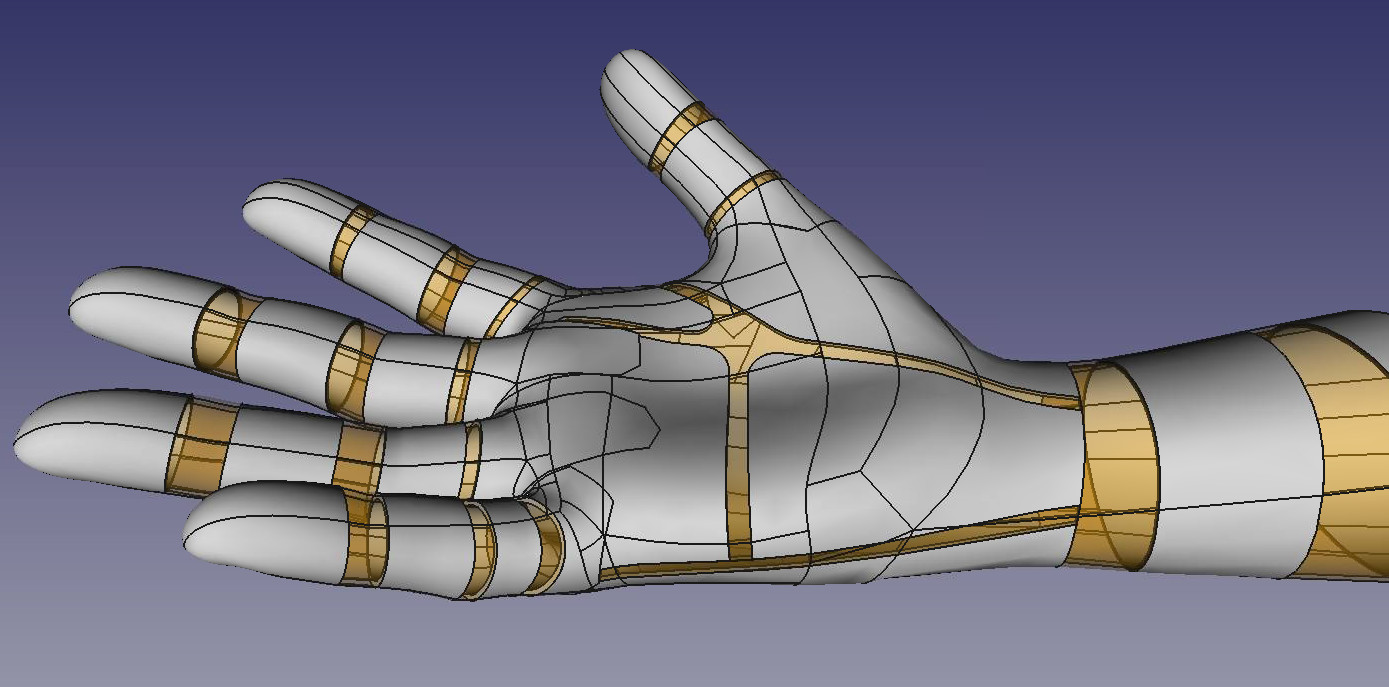
- We need software for designing the AI hand 3D printed parts which is scripted and written in Python running under Linux. The purpose of printed parts is to create complex wax mold copies from which the final parts are cast. The wax is dissolved by applying heat and recycled. For now we can use something like FreeCAD and its features to mill out 3D solid shapes and create parts such the ones below. The grey parts can be 3D printed in common materials such as PLA or ABS, while the gold parts are printed in flexible material such as TPU. This allows a semi-rigid flexible jointing mechanism. A sample hand in FreeCAD 0.20 and above is here: hypercube_hand1.FCStd. It was generated using MakeHuman. After conversion to STEP file, it is imported into FreeCAD. Use part > thickness and part > slice apart tools to make neatly lined up 3D printable hollow body shell fragments. Use scale operations to resize.
- We need a test bed that takes feedback from different hand designs and alter the scripts to make incremental improvements with each iteration. The test bed is driven by Linux programs written in Gambas with a GUI interface to make it function easily.
- We need to make the test bed portable so that it can be fitted to humanoid robots that can transport it to places of testing and work, so it may be tested in situ under real work conditions.
- We intend to use AI infused Hypercube Neural Net to control the hand.


