STDuino Blue Pill Variant Working Example
All boards here will at some stage become open sourced along with its software
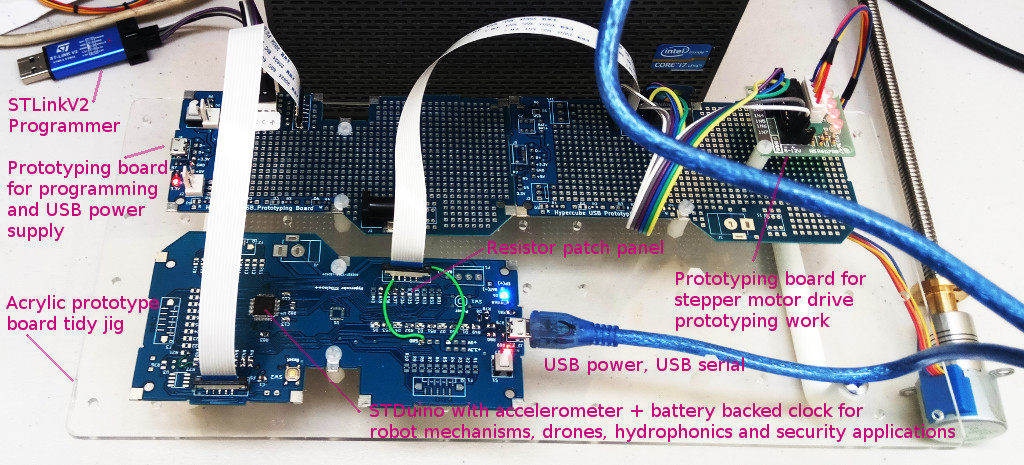
- The above working example shows a collection of boards customized and bolted onto a flat acrylic work tidy jig during development work.
- All the boards are connected by FPC.
- These FPC cables can each handle 1 amp along each wire. That is because they are made from real wire that has been flattened and insulated. Other methods such as conductive ink, deposition of thin layers of copper on to film are no competitor to this type of high current high quality FPC wire.
- The FPC are type AB cables.
- The connections to each FPC pin has a resistor in series. This is used as a patch panel to wire any wire from CPU side to any FPC pin.
- For direct connection, a 0R resistor is installed (in above picture to drive the stepper motor).
- For CPU connections, a series resistor of about 22R or higher can be used to help prevent IO line short circuits and wiring errors damaging CPUs and peripherals.
- The whole system is be dismantled in seconds from the jig and applied across a real 3D Hypercube. Every board is connectorized. The system is 5S compatible.
- The software is set up to run under Linux. Arduino IDE has been installed. So too is ST's AC6 Eclipse compiler. (Documentation to set up from scratch to follow soon...)
- The Arduino IDE was used to write a simple program that rotates unipolar stepper motor using ULN2003 driver chip.
- The STDuino plus plus is a little more functional than standard blue pill STDuino.
- It has independent real time battery backed clock so that autonomous systems can wake up and do jobs like feed pets, hydroponics, and robotics with a clear awareness of time.
- It has a accelerometer. This allows the device to be used in a drone as its controller to stabilize flight. (We will be building drone controller software and open sourcing it.)
- The accelerometer is also useful as a security device. When fitted to a door for example, it can detect vibrations.
- Also, if you are building more complex droids with it, it is useful to have orientation information from many boards and be able to write software to deal with so much data from many sensor arrays at the same time. This tech is all about paralleling up as many sensors as possible, wire it in 3D and make sense of the data. We will write a lot of open source multi-tasking code and release it to help this process.
- The STDuino can be powered from USB. The USB emulates an RS232 serial port under Linux, and sends serial print statements at high speed through USB to the Arduino IDE reliably without using up extra RS232 lines.
- We already have a Linux program that filters speech messages received mingled in with RS232 data. That will be released open source with the boards.
- We are really looking forward to all our robots, drones and hydroponics systems sharing us their data and talking to us soon :)
- Some videos
- https://www.youtube.com/watch?v=or7QhCyJKMw - its alive! First software running controlling a stepper motor and LED snake with each thread multi-tasking away.
- https://youtu.be/BPf9Hm94fb8 (this shows SPI bus connected RFID MFRC522 working)
- https://www.youtube.com/watch?v=t3sxd4kvP4c - We will also release a speech synthesizer for streamed RS232 data. Enclose the data in <s>..</s> and it will speak your data. Very handy for IoT projects. This software we have working for ARM SoC capable of running Linux.
- https://youtu.be/GDHiX2qDIgg - This is Hypercube assembled with RFID reader, stepper motor running and LED snake programs running. All done properly with multi-tasking software which shows the benefit of writing robust multi-tasking code to assemble complex embedded systems rapidly without spending a lot of developer time fighting the code.
- List of other boards under development
