The STDuino powerful enough to generate around 20 independent servo signals in software and just one timer
- The servo signal is pulsed every 20ms.
- Each servo signal is staggered relative to previous servo signal that was sent out.
- This is to ensure that each servo drains power evenly - otherwise if all servos tried to move at the same time, the power supply may get overloaded.
- The servo signal is 1.5ms +/- 0.5ms. The nominal middle position of the servo arm is achieved by sending a 1.5ms pulse every 20ms.
- The specification is flexible and some can accept signals 1.5ms +/-1ms for greater precision.
- For the moment the software is set to 1.5ms +/- 0.5ms
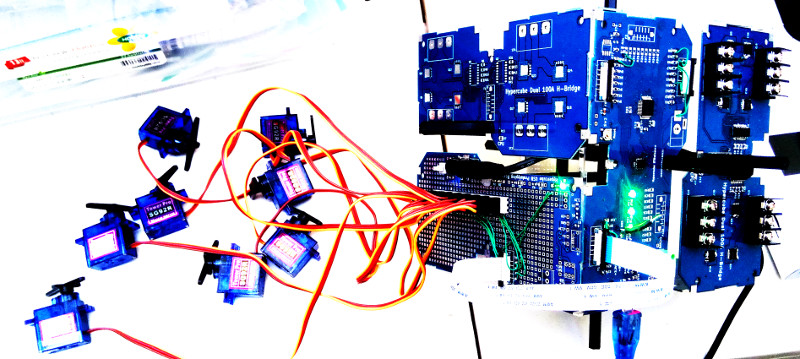
- The software is controlling 8 servos in real time in this demo below:
- The software is multi-tasking code - and soon to be released under GPL.
- With this kind of software, you can build any kind of animal and robot humanoids and animate them freely.
- List of other open source boards and associated software